Pictures of the Scitech Walking RobotBartoszek Engineering donated a six-legged walking robot to Scitech (the hands-on science museum in Aurora, IL,) called the "Scibot," to be used at Engineering Summer Camp, and other outreach programs. The pictures below show it being tested during Summer Camp, which happened this year from June 28 through July 2, 1999. The scenario laid out was that the participants in Engineering Summer Camp, kids aged 10-12, were members of a NASA design team assigned to evaluate a robot that had been designed and built by another team for interplanetary exploration. The kids designed the test apparatus and methods, following some guidance from Larry Bartoszek, and walked the robot through a series of trials to find out what it was good and not so good at doing. The robot performed well at the task of towing objects on a horizontal surface, had good battery life (> 2hrs), but did not do so well at climbing ramps either up or down. Turning was also a problem since the phase of the legs on both sides could change during turning which led to an unstable gait. The basic design concept of the robot was based on Gordon McComb's book, "The Robot Builder's Bonanza--99 Inexpensive Robotics Projects". This project taught all of us many things. Larry learned that there is no such thing as an "inexpensive" robotics project, and what worked and what didn't using the robot in a classroom setting. The kids all learned much about the hands-on of engineering development and testing. Many thanks go to the people and companies that helped turn the robot from concept to reality. Dave Johnson of Scitech did the machining of the pieces. Motion Industries (formerly Berry Bearing) of Montgomery, IL, donated some of the cost of the parts. Quality Fasteners of Batavia, IL, donated some of the cost of the fasteners. Thanks also go to the teacher of Engineering Summer Camp, Paul Medernach, and Ronen Mir, the new director of Scitech, who graciously provided these picture files. If you'd like to download the Word 97 file which contains the design and test report that the class used, click here.
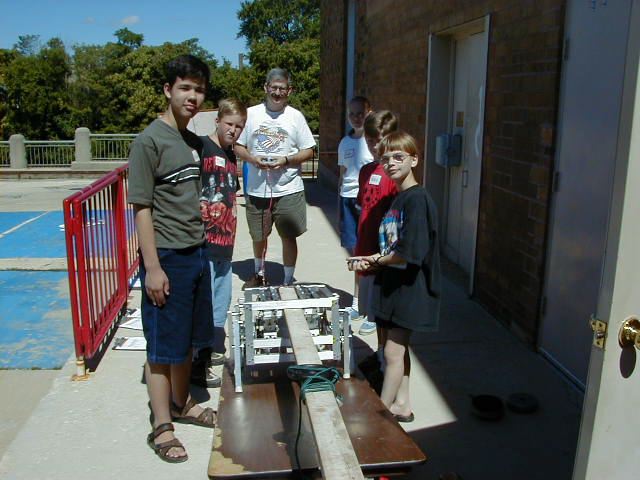
This picture shows the Scibot undergoing a test of a modification to improve its ability to climb ramps. We discovered that the center of mass of the robot was too high with respect to the distance between its legs when it kept falling backwards as it tried to climb a ramp. An earlier test showed that we could greatly improve its ramp walking ability by adding weight to the front of the robot. This test was to determine if a smaller weight could be used if it were suspended out the right distance in front of the robot so that the torque from the weight the robot experienced matched the previous weight's torque. The experiment was a dramatic failure (but very successful learning experience,) because the dynamics of the system were completely changed by the presence of the 2x4. The lever arm caused the robot to bob off its legs as it walked, crashing up and down.
The teacher, Paul Medernach, walks the Scibot on the loading dock in back of Scitech. Walking is controlled by simply throwing two DPDT switches on the control pendant either forwards or backwards. The legs on each side are run by one motor on each side. Switching the switches in opposite directions causes the robot to turn.
This close-up shows the slider-crank mechanism of the legs, and some of the chain drive connecting the legs to the motor. The motor is connected to a custom worm gear box that provides 50:1 reduction, and the chain drive provides 2:1 reduction. The series reduction of 100:1 allows the robot to walk at about .28 ft/sec. This is slower than human walking speed, but much faster than the Pathfinder Robot on Mars.
This view shows the battery of the Scibot. It is powered by a Sears DieHard gel-cell wheelchair battery. The gel-cell was chosen over a lead-acid battery for safety considerations. It worked very well and did not need recharging throughout the week of Summer Camp.
The Scibot taught the class about many aspects of engineering design, reliability and development. There were several maintenance problems uncovered during the week of testing, such as the need to lubricate the leg joints so that critical screws would not be loosened by the walking action. Chain tightness was also an issue. When the Scibot is pushed too far the frame can deform enough to allow the chain to skip a tooth on the sprockets.
Back to the Bartoszek Engineering Projects Page
Back to the Bartoszek Engineering Home Page
|